Y軸の組み立て
Y軸の組み立てに入ります。
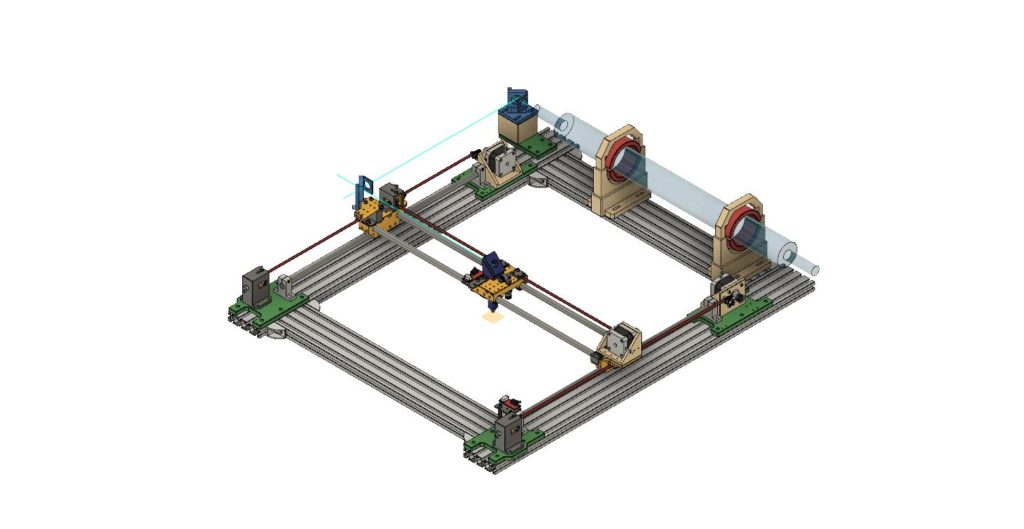
ベースはアルミフレームを使います。
きっとケースやワークテーブルの自由度も上がるハズです。
相変わらず後付け設計ですが、どうなることやら・・・

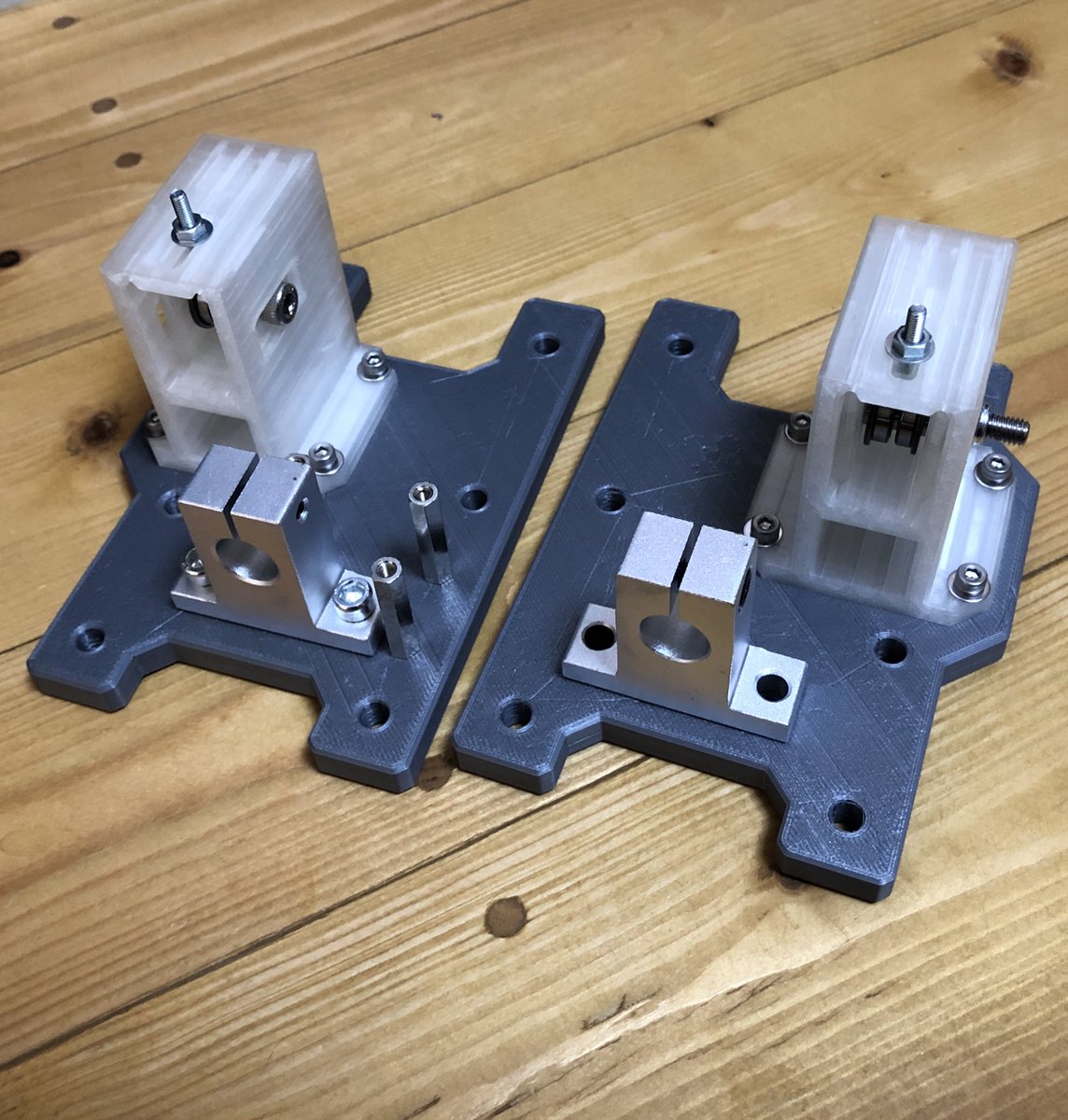
アルミフレームにのせるスペーサーを3Dプリント。
このスペーサーで高さ関係のつじつまを合わせます。
形状は長方形でもいいんですが、カッコつけです。
材料節約にもなるかな。
こんなのをあと3種類出力します。
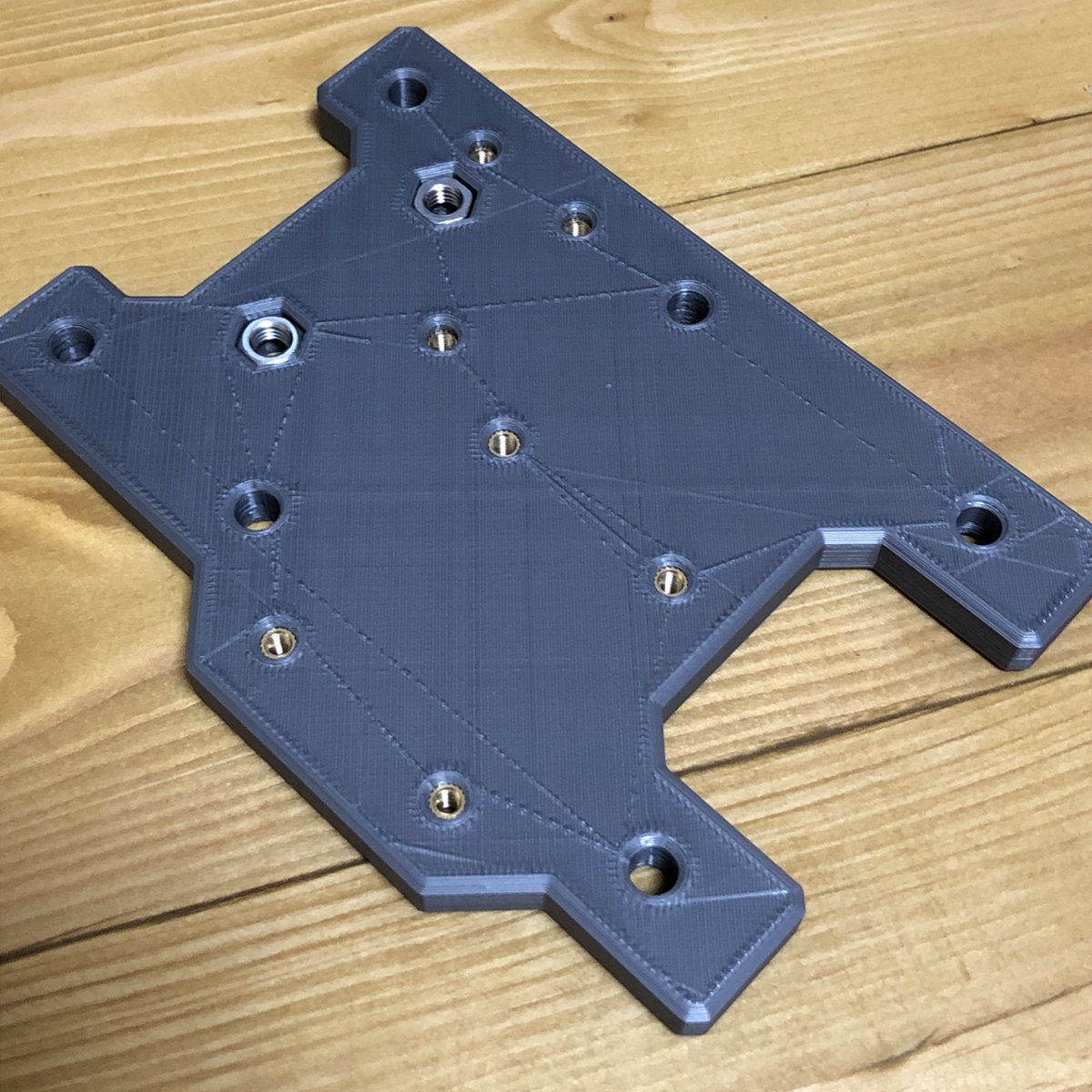
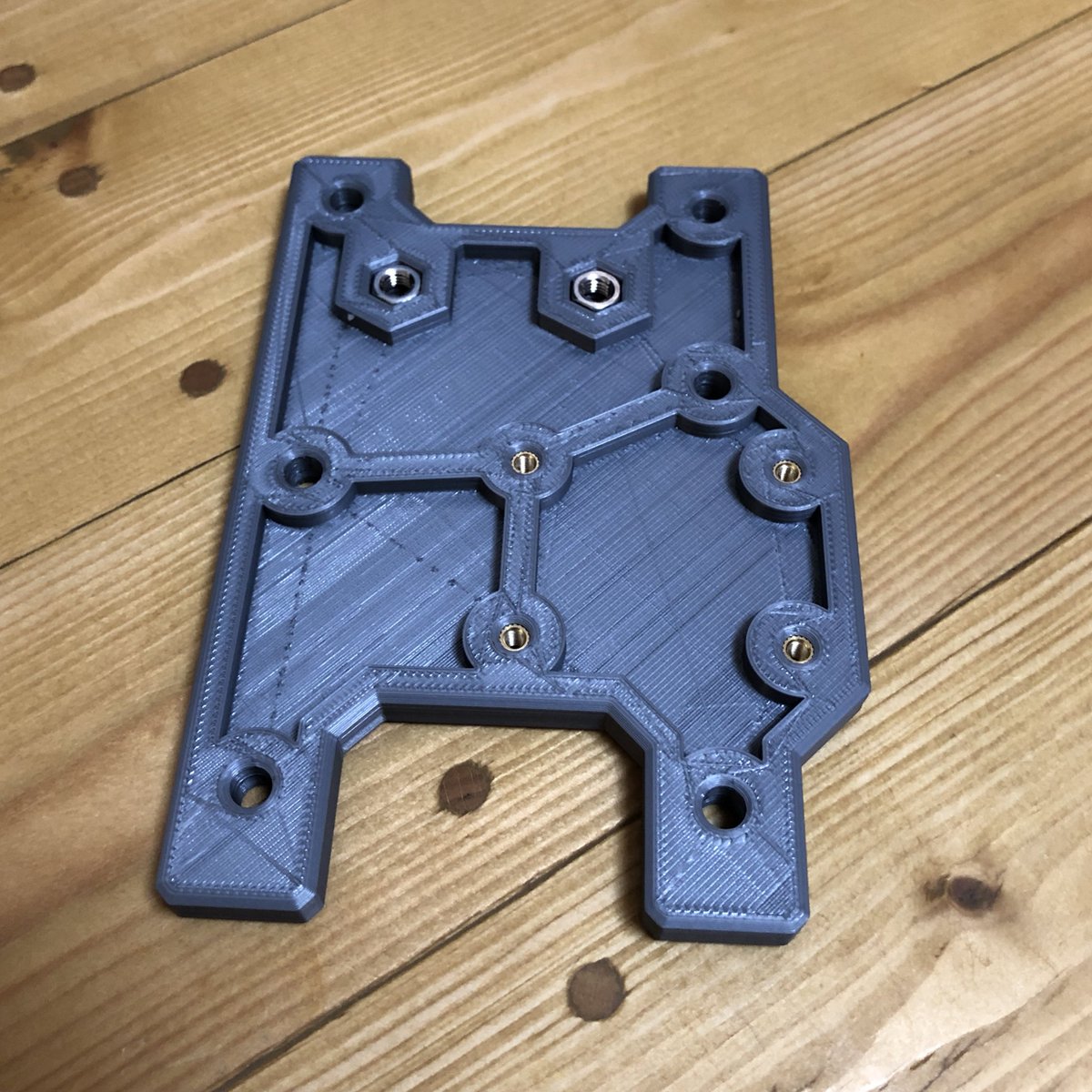
2/4個目のスペーサー。
今回はシェルとリブで強度を保てないか実験。
前回の箱型よりもねじれに弱い感があるが、ベースに固定するのであれば、問題なさそう。
アルミフレーム届いた。
カッケー。
てか、でかい。
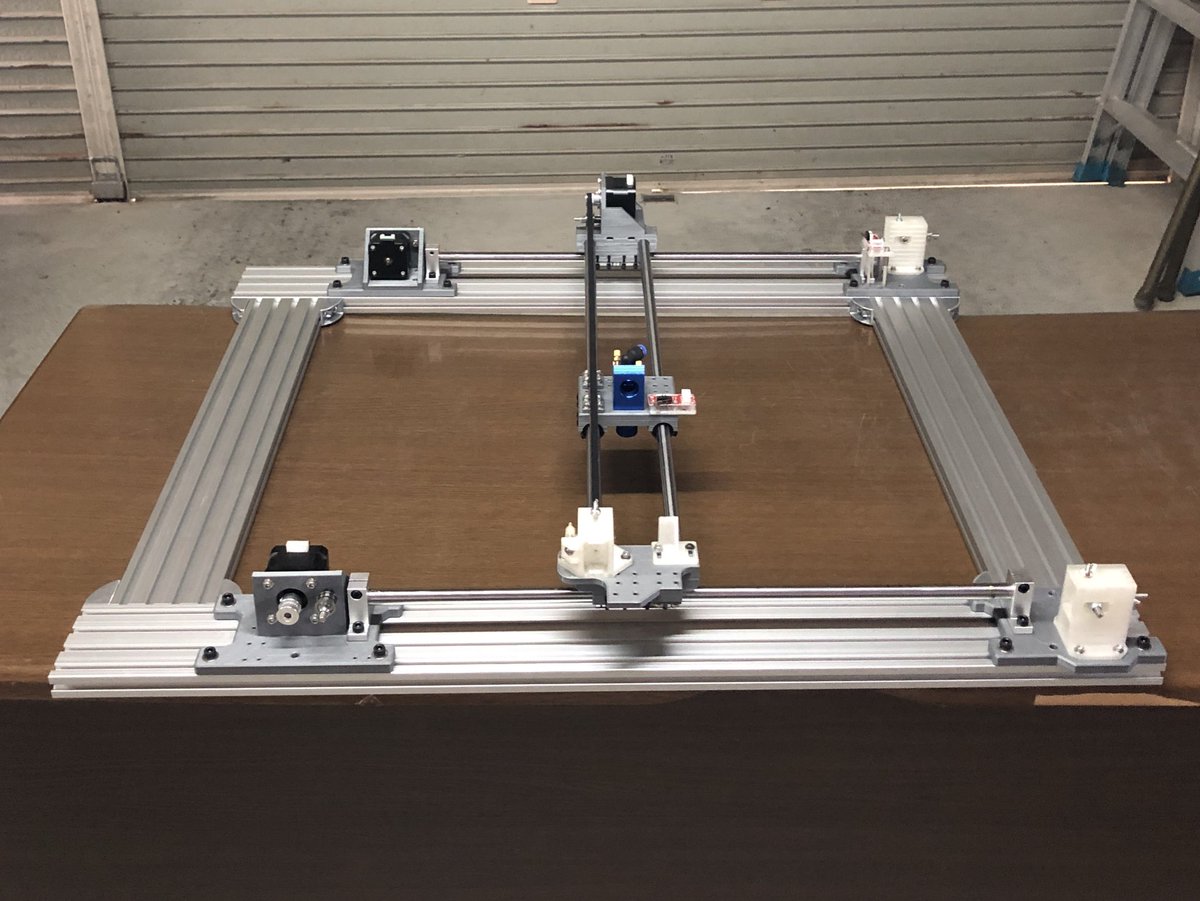
スペーサーのプリント終わったので載せていきます。


仮組みしました。
なんかXとY軸の直角が出てない。
フレームがおかしいのか、軸なのかよくわからず、煮詰まったので中断。
でかくて真っ平らな作業台欲しい・・・
日を改めて作業中。
とりあえずコンパネ敷きました。
アルミフレームの直角度を確認。
アルミフレームが平行四辺形だ 。
組み立て注意ですな。
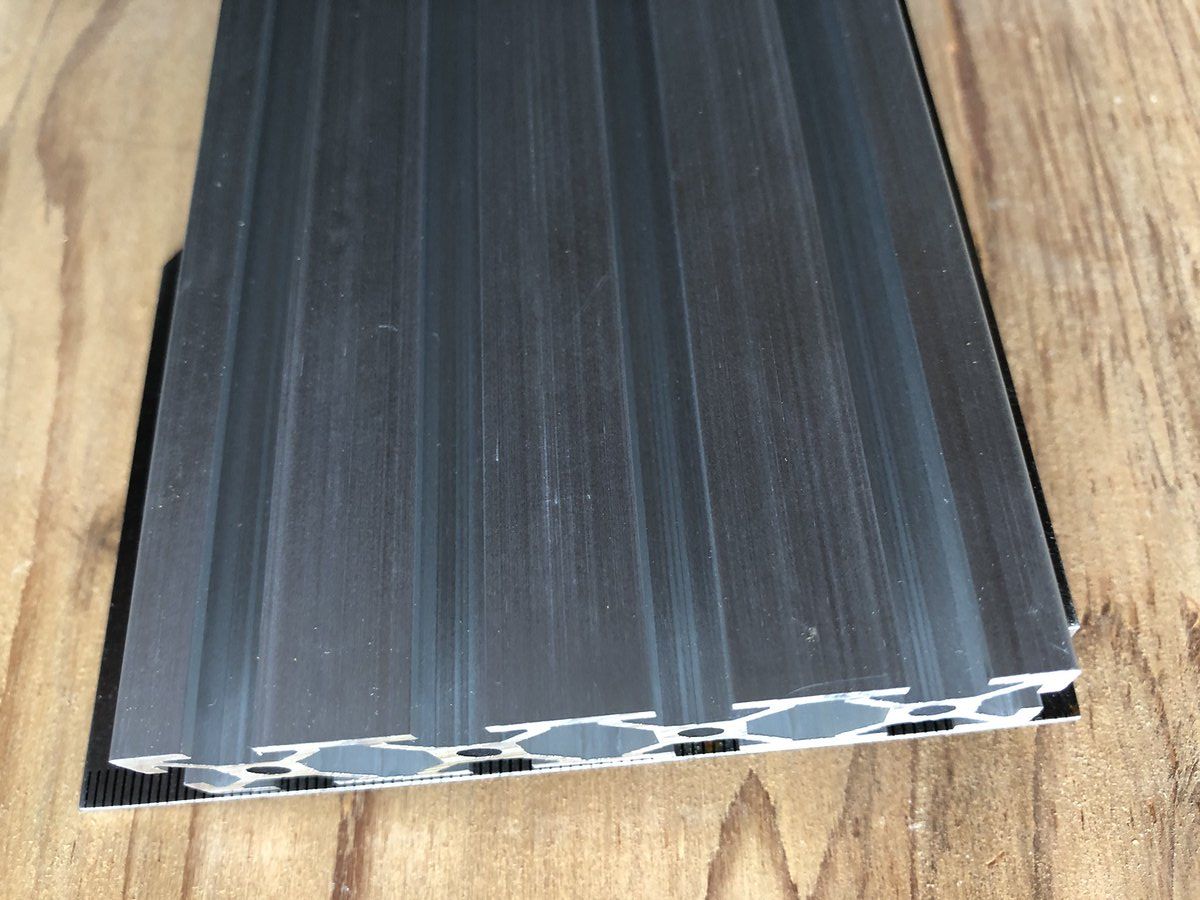
平行四辺形なのは確かなんですが、金具である程度精度よく組めるんですよね。
わかりにくいですが、1枚目の左側にスキマできる感じで直角でます。
※寸法公差内なので不良つかまされたわけじゃないです、念のため。


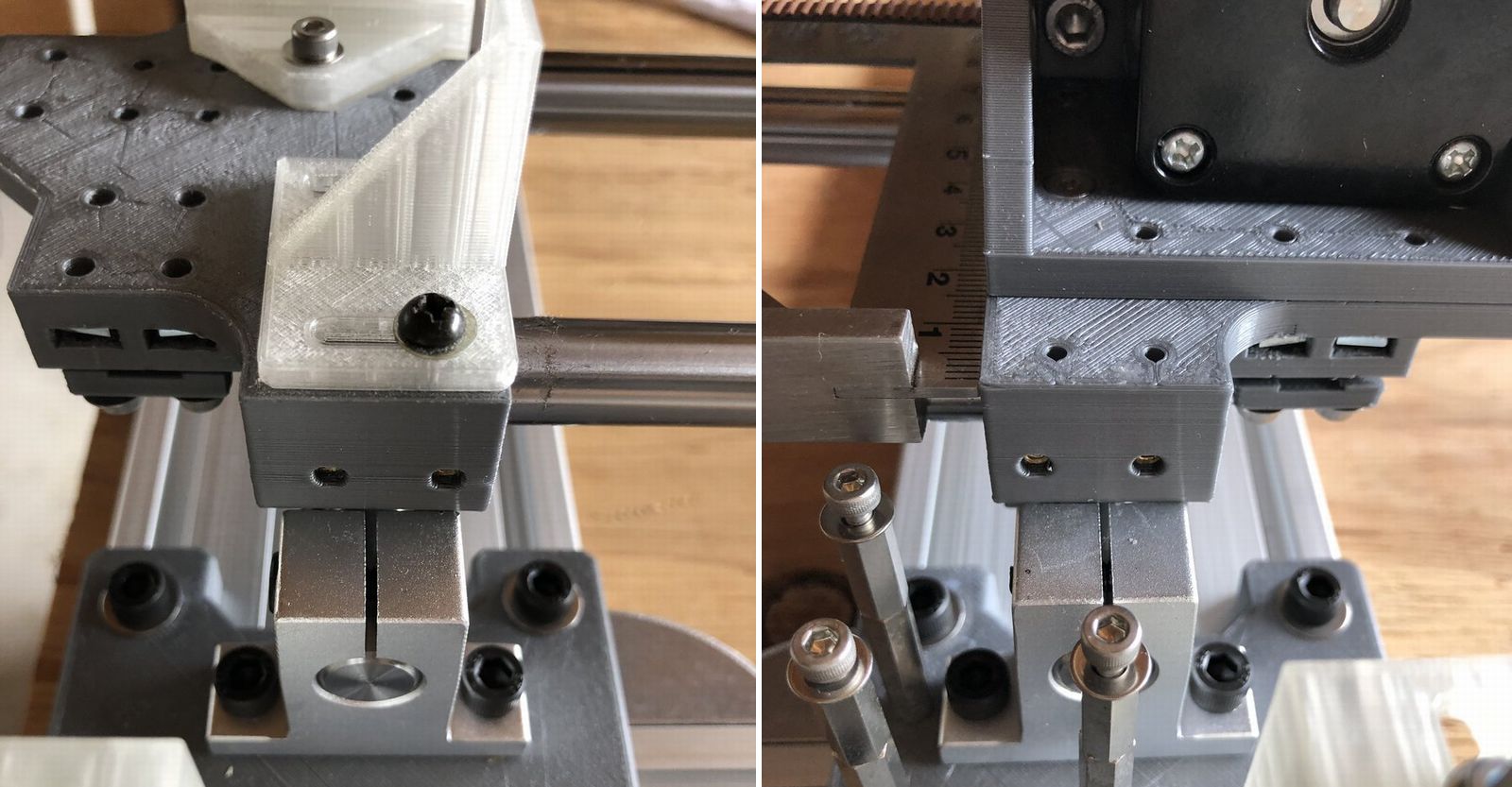
直角出し。 だいぶ良くなってきた。
シャフトホルダーとキャリッジの隙間が左右で違いますが、昨日はこれが8mmも差がありました。
シャフトホルダーの位置は左右で揃えたつもりですが、絶対的な基準にならないような・・・
直交の最終確認は実際に矩形でも描画するしかないのかな?
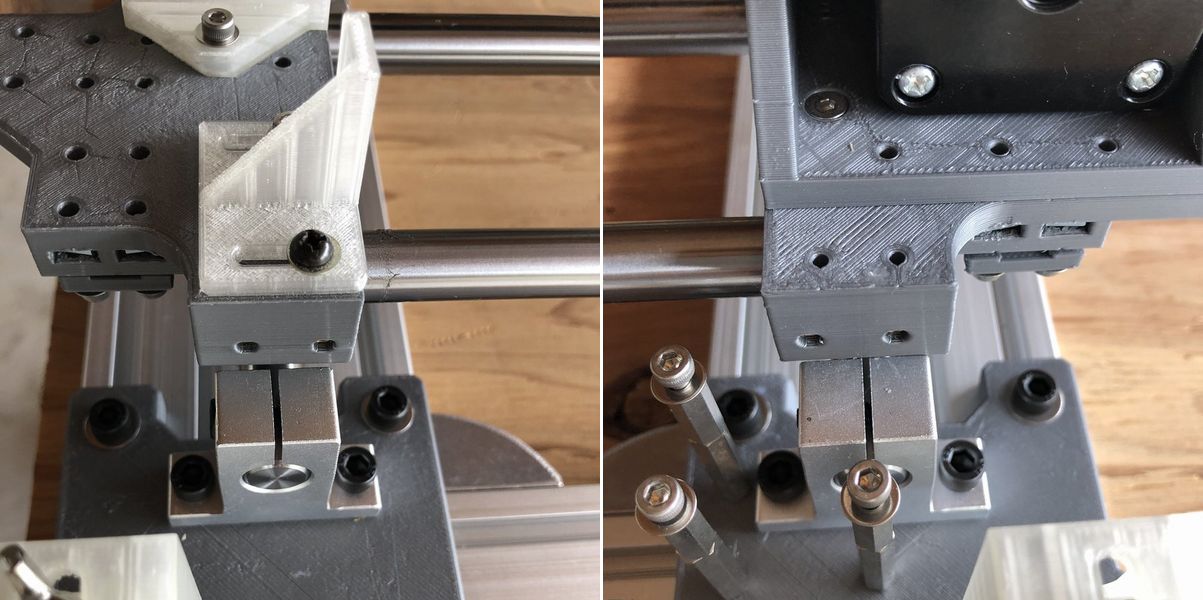
Y軸の後ろ側を左に振ると、左側のキャリッジとシャフトホルダーの隙間が無くなったので、ある程度調整はできるという理解でいいのかな・・・
Y軸動作確認
ベルトを張って、動かしてみます。
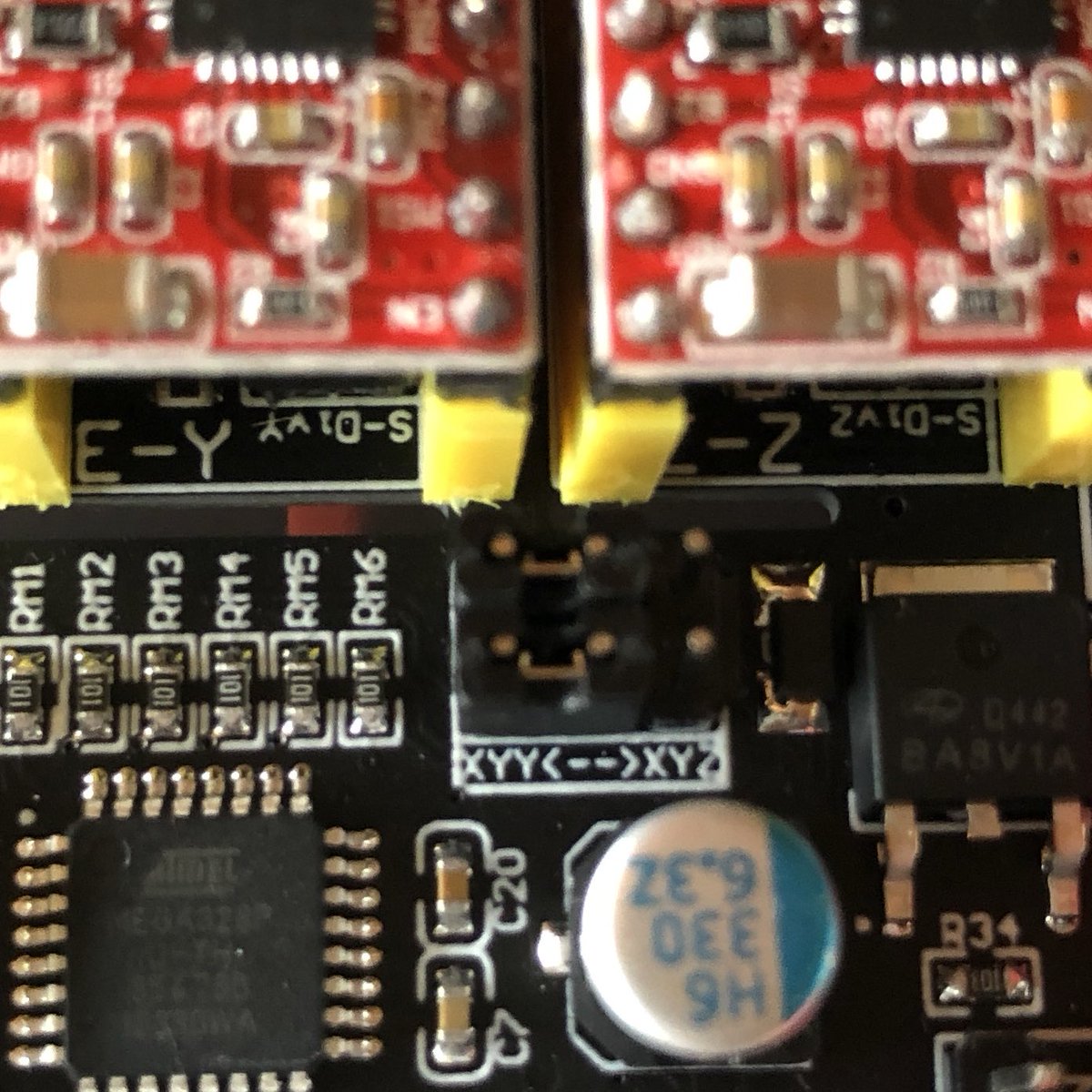
Y 軸はモーター2個なので、制御基板のジャンパーピンをXYYに設定します。
この状態でもZ軸リミットスィッチは有効なんだ。
Z軸のリミットスイッチいらないんだけどなぁ・・・
Y軸は2個同時にちゃんと動きました。
動作確認中の動画。
200mmの円。
結構うるさい。
Y軸右側がなんかギシギシ言ってるような。
とりあえず動いたという感じです。

でもなー、モーターケーブル抜いて手でガシガシY軸動かしても変な音はしないんだよな。
モーター制御すると右キャリッジから異音が。
左右で何かが違う模様・・・
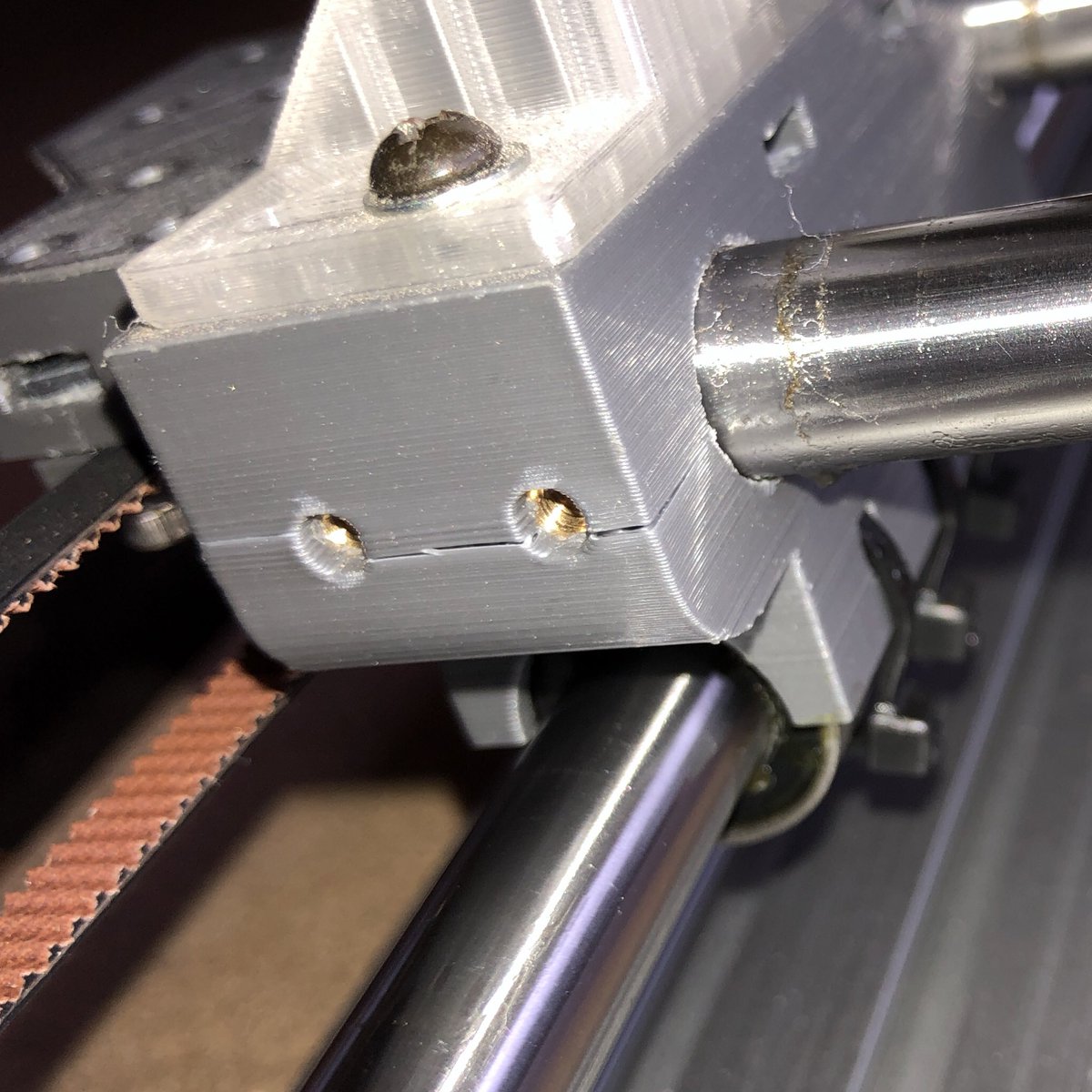
と、いろいろいじってたらY軸キャリッジが割れてるのを見つけた!
左右どちらも割れてる。
虫ネジの締め付け圧に耐えられなかったのでしょうか。
ショックです・・・
というわけで、 割れたので作り直し。
補強のためにとはいえ、大きな変更はしたくないので肉厚にする方向で。
あとシャフトの挿入も深めに。
すぐに対応できるのも3Dプリンターの良いところ。
先は長し・・・・(続く)