
ハーネス交換
前回、せっかく組み立てたY軸キャリッジにヒビが入ってしまいました。
割れてしまったキャリッジを交換する前に、新たに作ったロボットケーブルのハーネスの動作確認をしておきます。
動作は問題ないようです。
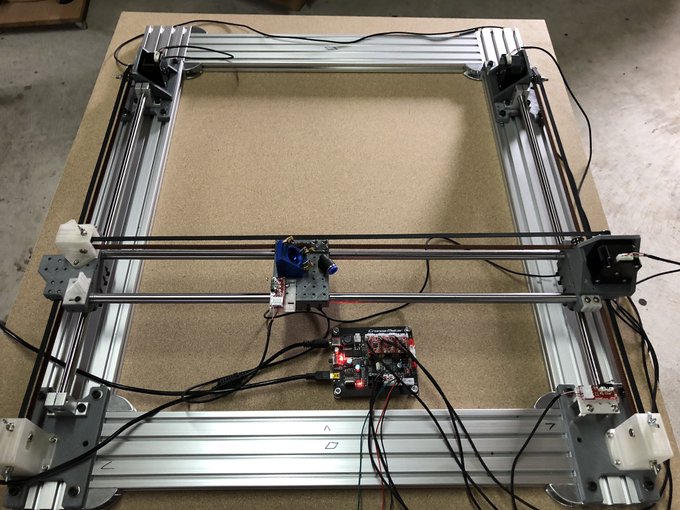
直行度確認
レーザー管を設置して光学系の調整をする前に、XY軸の直行度を調整しておきます。
なぜならXY軸の直角 が出ていないと、例えば矩形をカットした場合に加工物が平行四辺形になってしまいます。
光学系の調整次第では加工に歪みが生じるようなこともあるようですが、まずはメカの直行度をしっかり担保しておきます。
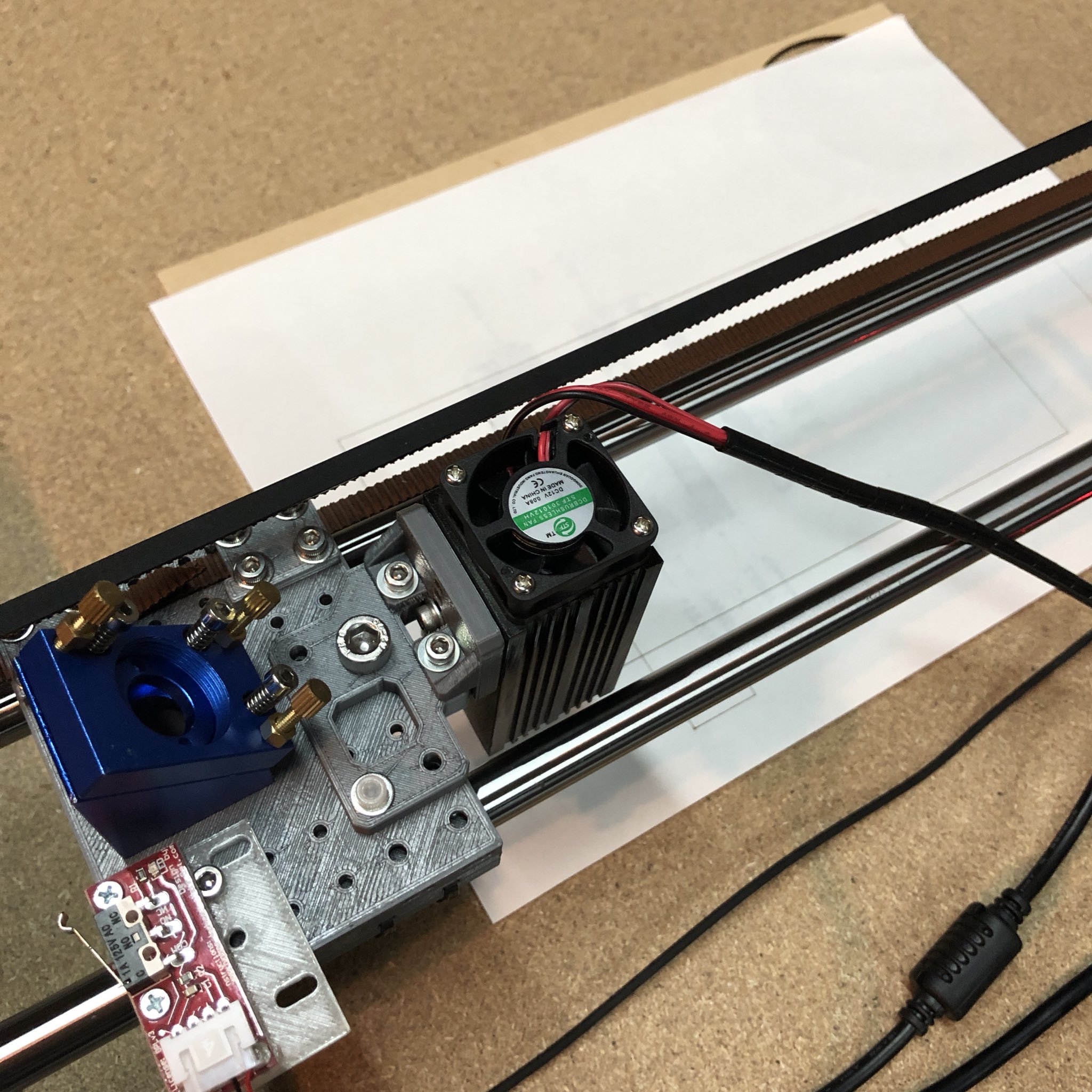
半導体レーザー( CNC3018付属品) 用のブラケットです。
これをX軸キャリッジに取り付けて、実際に描画して直行度とか円の具合を見てみます。
あと移動量の確認にもなります。

実際に取り付けた感じ。
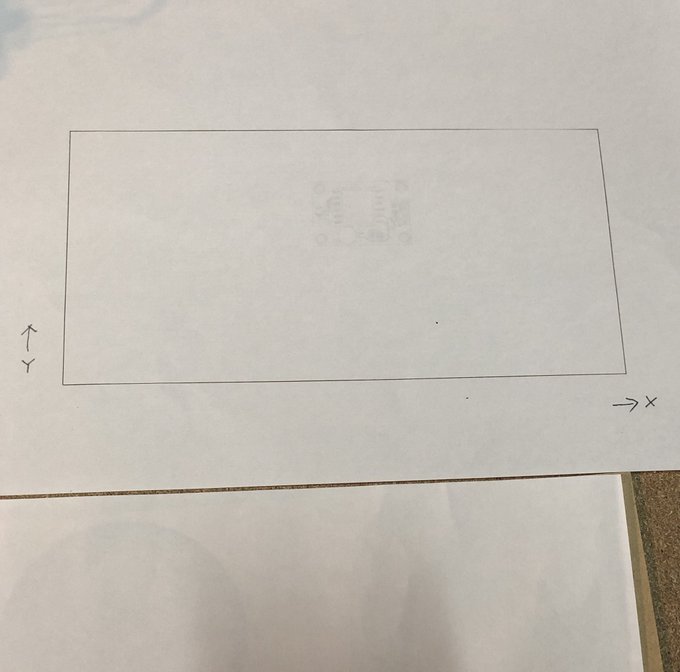
カットの様子。
コピー用紙を矩形にカットします。
ワンパスで切り抜けます。
このレーザーヘッドは5.5Wを謳っていますが、実際には FLM(Fabool laser mini)3.5Wの方が強力です。
2.5mmMDFのカットは厳しいです。
ぱっと見分かりませんが、少し平行四辺形です。
調整できるかなぁ・・・
メカ調整後、 だいぶマシに。
Y軸のプーリ歯を左右でズラす調整が一番効きます。
実はFLM3.5Wでも同様のやり方をしてるんですが、 残念ながらY軸モーターは左右で独立しているので、電源(励磁)切ると再びずれる恐れあり。
だから、左右のY軸をシャフトで連結して1モーターで動かす作例が多いのでしょうか?
その場合、メカ的に一度調整すれば左右はズレない、はず・・・
さてここまでで、 よく解っていないことがあります。
①Z軸を無効にする方法
②2つのY軸を別々にリミットスイッチを設けてホーミングする方法
①はGRBLのヘッダーをいじるようなのをどこかで読んだ気が。
②が可能なら、現行のY軸モーター左右独立方式でも電源ON直後に原点サーチすればXY軸の直行度は担保されます。
現在ハード的にXYY軸に設定してるけれど、Z軸のリミットスイッチをY軸に割り当てたりできるのだろうか。
ちょっと調べたところ、 ①はオリジナルマインドさんのところで具体的な編集方法見つけた。
config.hを変更することで、X軸だけまたは、XY軸のみで原点復帰が可能なようです。
https://www.originalmind.co.jp/special/arduino/Arduino.pdf
元記事はこちらです。
大変参考になります、ありがとうございます。
https://www.originalmind.co.jp/special/arduino/
私の制御基板は、購入後にGrbl1.1にバージョンアップした際、メーカーさんからHexファイルだけもらってローダーで転送したもの。
ヘッダを編集する目的で、普通にGrblをダウンロードしてインストールして、互換性あるか不明。
以上のことから、①、②を実現するために足踏みするより、Y軸を1モータ化して、先に進むことにします。