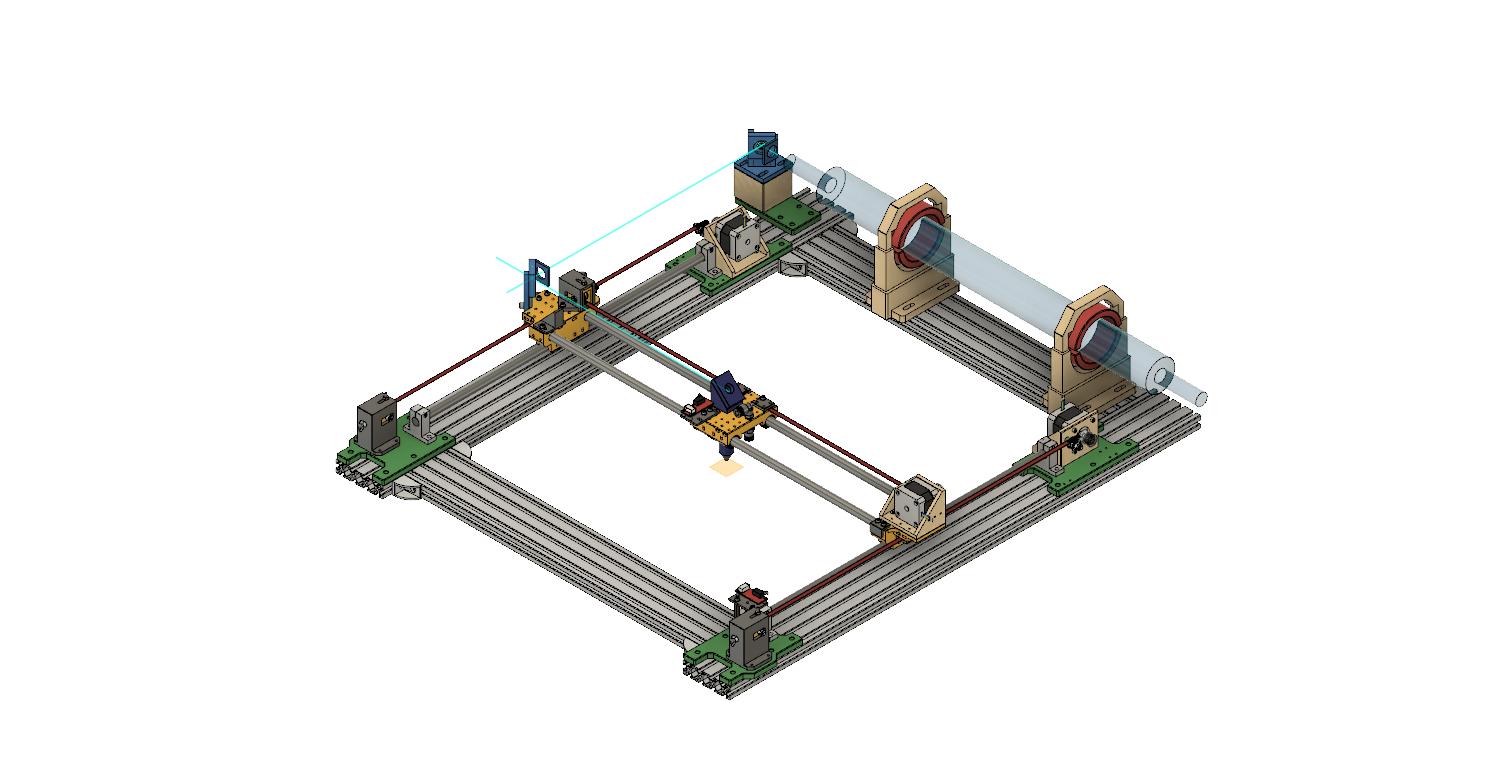
Y軸を改造します
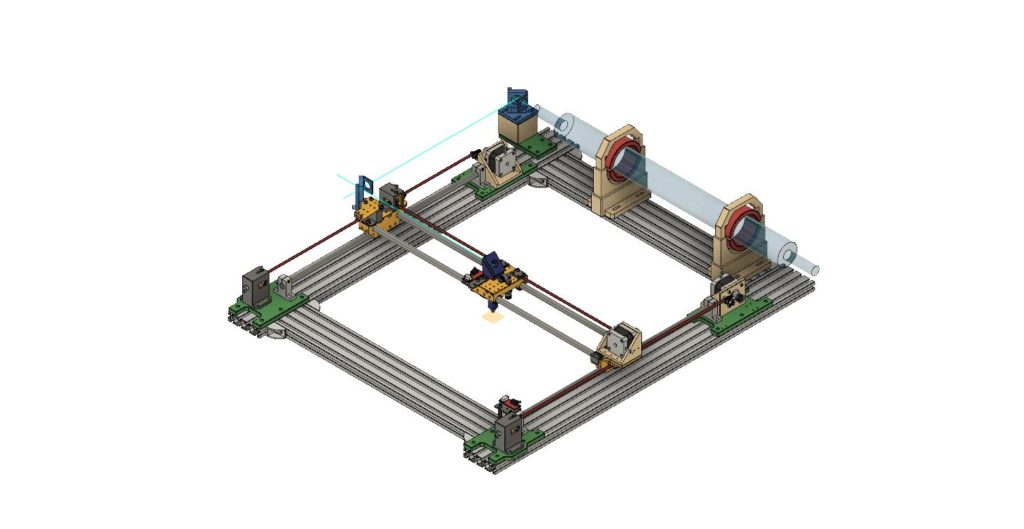
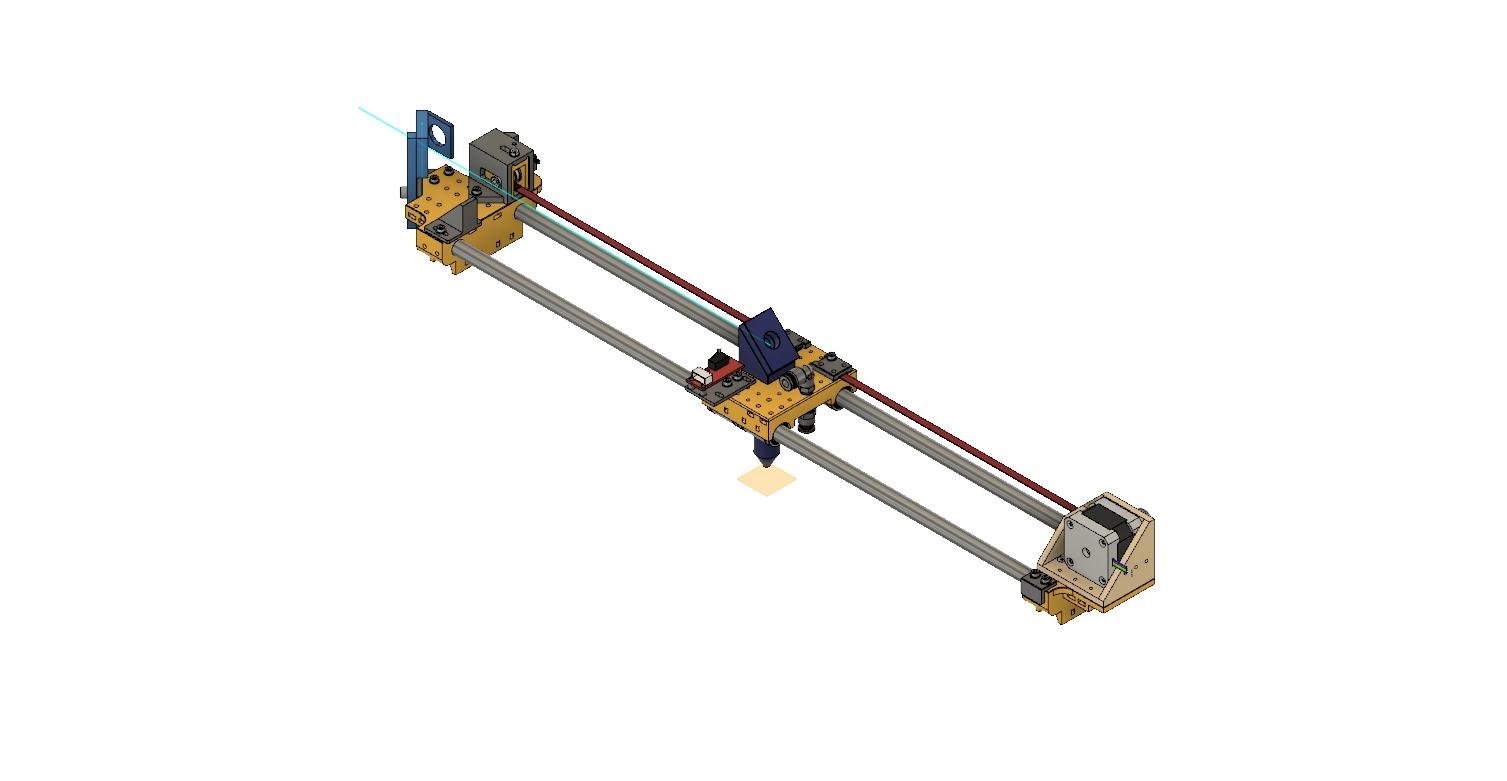
Y軸を現行の2モーター式から、左右のスプロケットをカップリングした1モーター式へ変更します。
XとY軸の直行度の調整は、こちらの構造のほうが補正しやすいと言う結論に至りました。
また、 改造のハードルの低さ=速攻性も決め手。
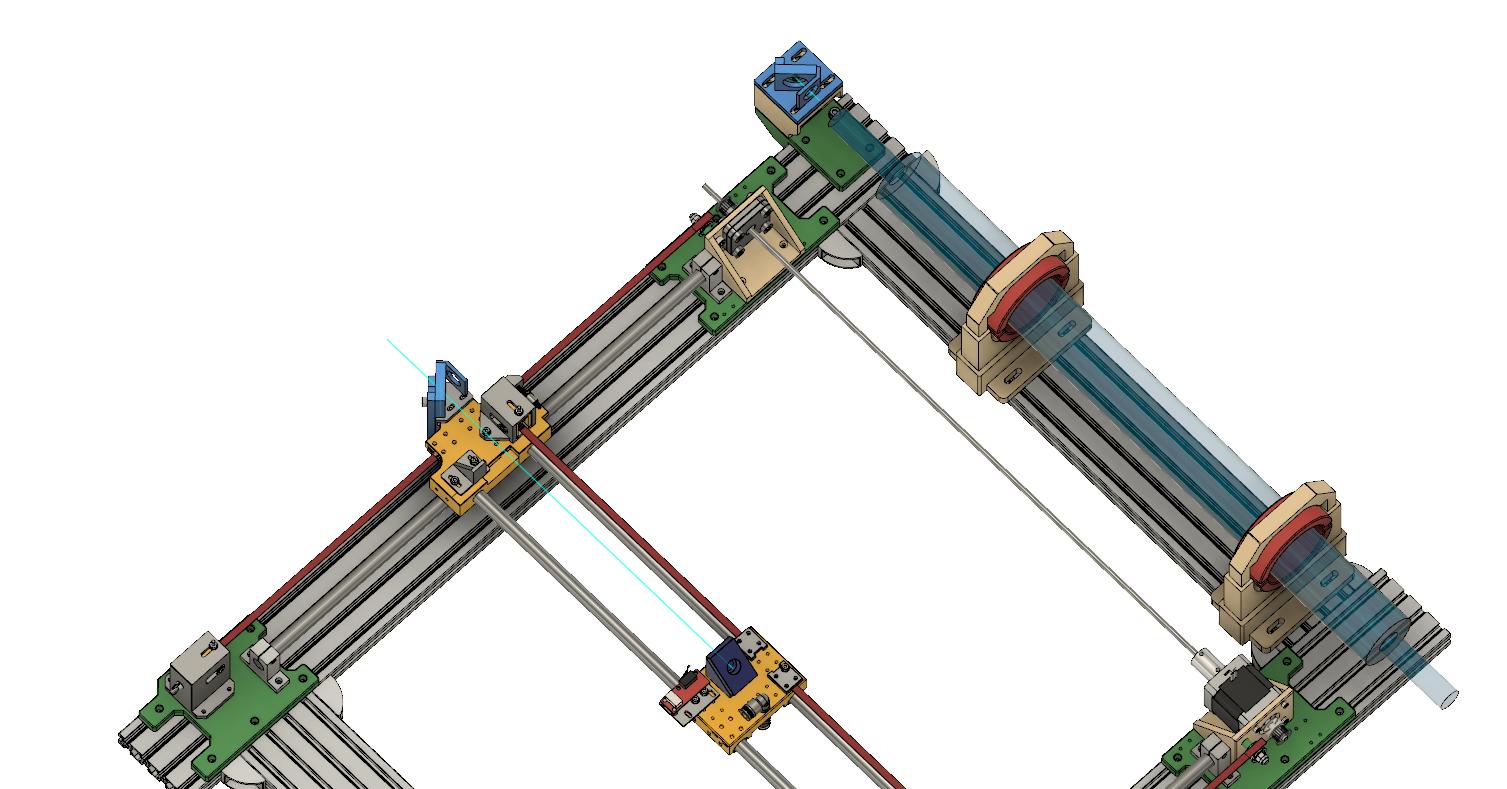
Y軸を現行の2モーター式から、左右のスプロケットをカップリングした1モーター式へ変更します。
XとY軸の直行度の調整は、こちらの構造のほうが補正しやすいと言う結論に至りました。
また、 改造のハードルの低さ=速攻性も決め手。
前回、せっかく組み立てたY軸キャリッジにヒビが入ってしまいました。
割れてしまったキャリッジを交換する前に、新たに作ったロボットケーブルのハーネスの動作確認をしておきます。
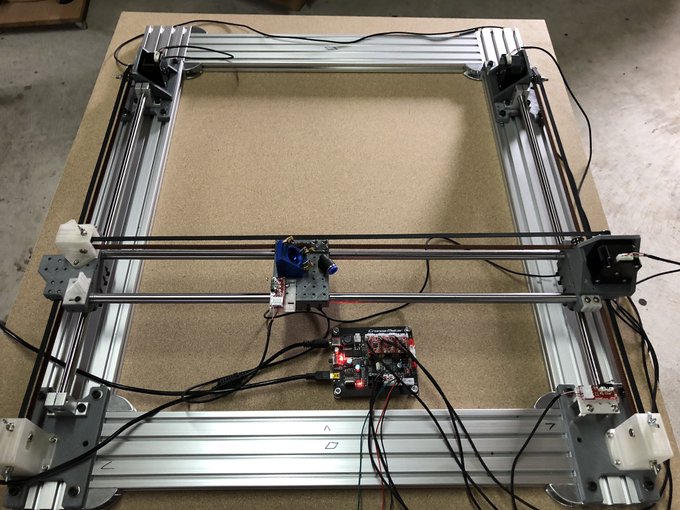
Y軸の組み立てに入ります。
ベースはアルミフレームを使います。
きっとケースやワークテーブルの自由度も上がるハズです。
相変わらず後付け設計ですが、どうなることやら・・・
アルミフレームにのせるスペーサーを3Dプリント。
このスペーサーで高さ関係のつじつまを合わせます。
形状は長方形でもいいんですが、カッコつけです。
材料節約にもなるかな。
こんなのをあと3種類出力します。
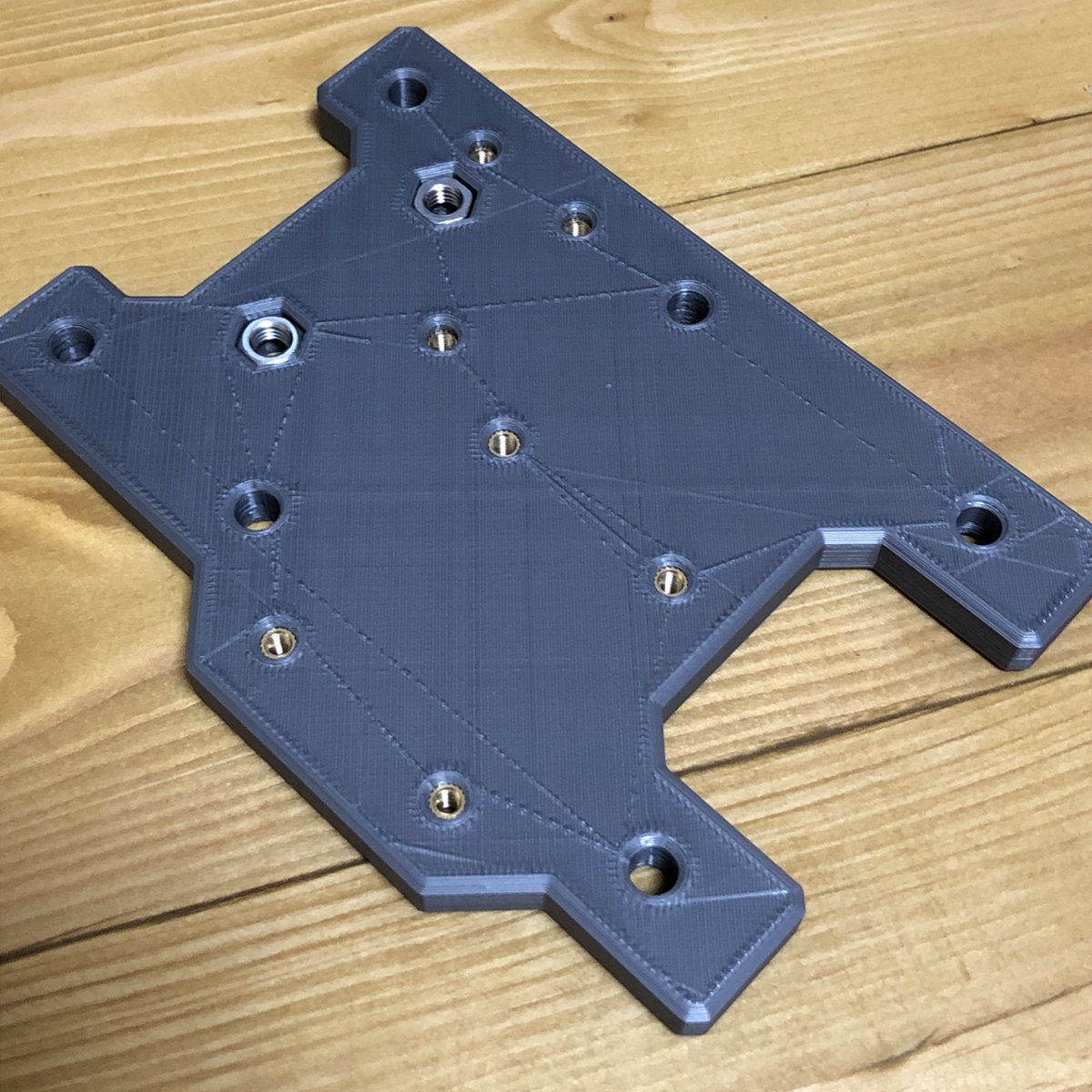
X軸を完成するに当たり、Y軸キャリッジのテストピースを印刷しました。
積層ピッチ0.2mm。
シャフトの取付穴は横穴なので形状がつぶれ気味です。
リーマー通そうかと考えましたが、12mmのリーマーって高そう。