カバーの設計、組み立て中
おおむねカバーの設計が終わって、既に組み立てています。
加工機本体は、しばしお休み。

前回よりなかなか更新できていませんが、実はカバーの設計が終わっていないのです。
おおよその形はできているのですが、部品手配まで至っておりません。
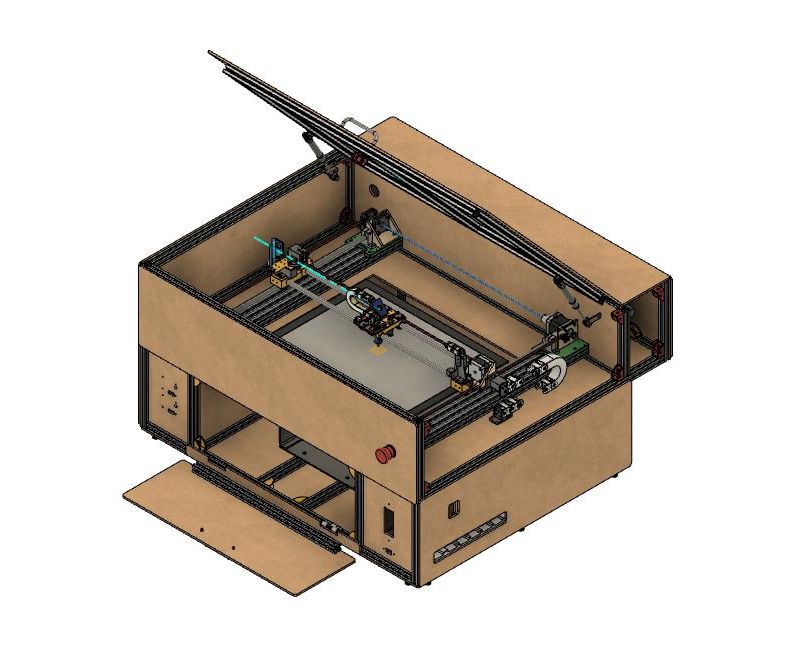
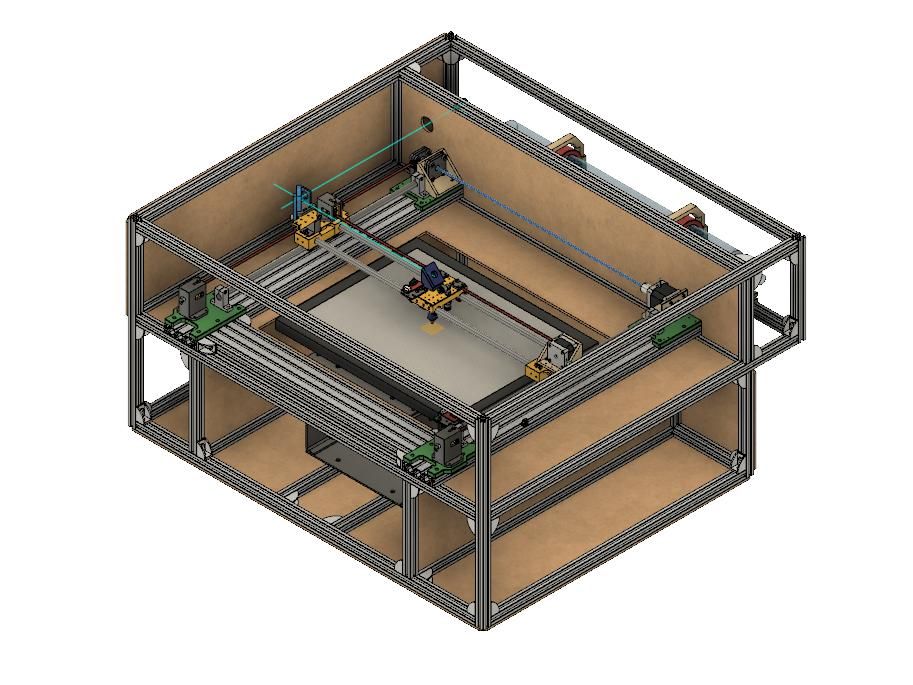
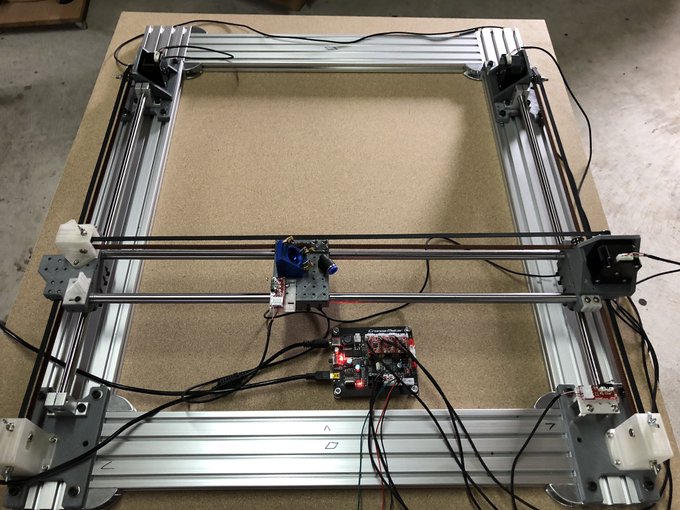
そのようなわけで、もう少し時間がかかるので今回は下図のような進捗の様子だけの報告となります。
尚、加工機本体の方は光軸調整を終えて、実際にカットまでできております。
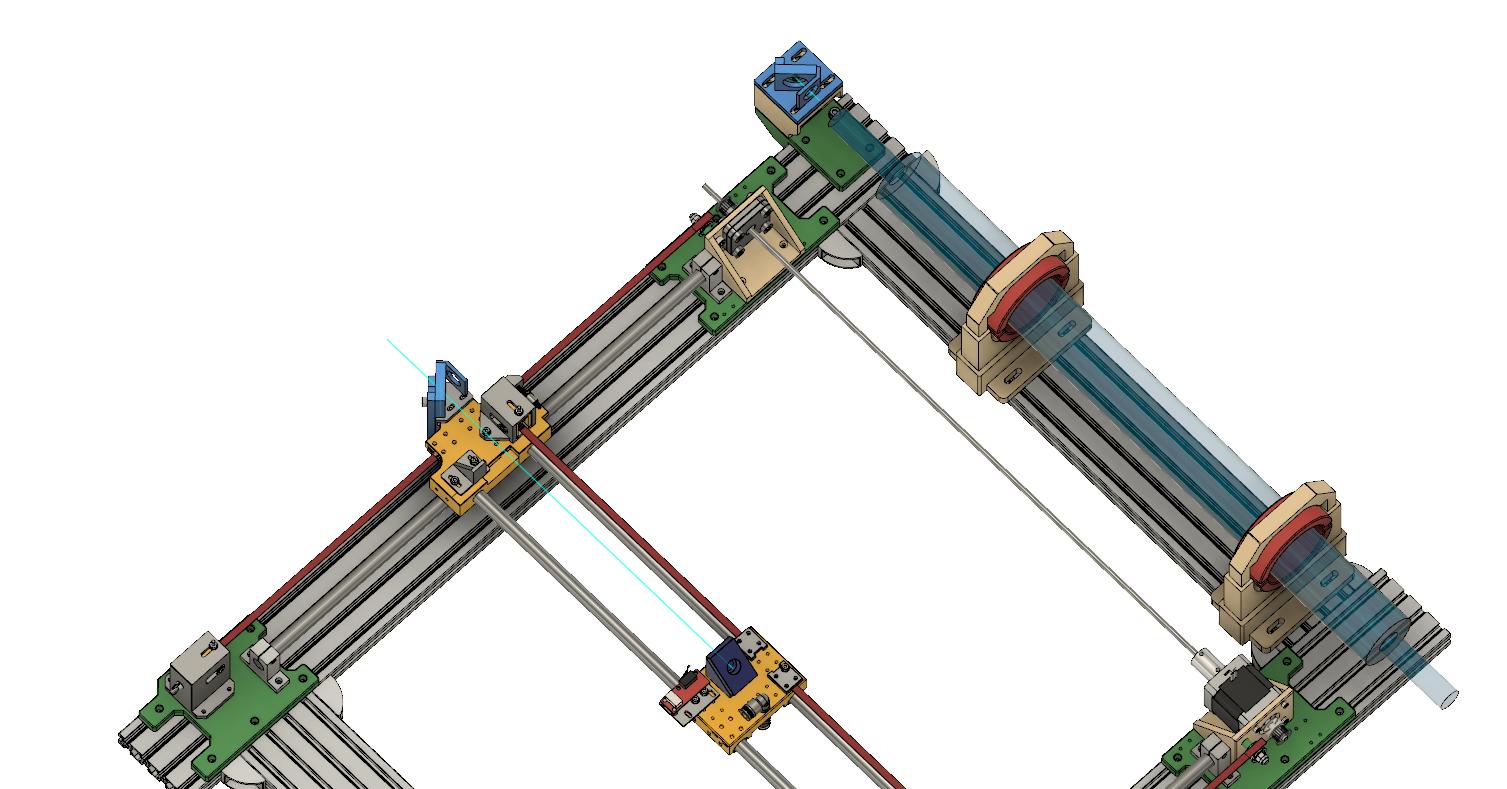
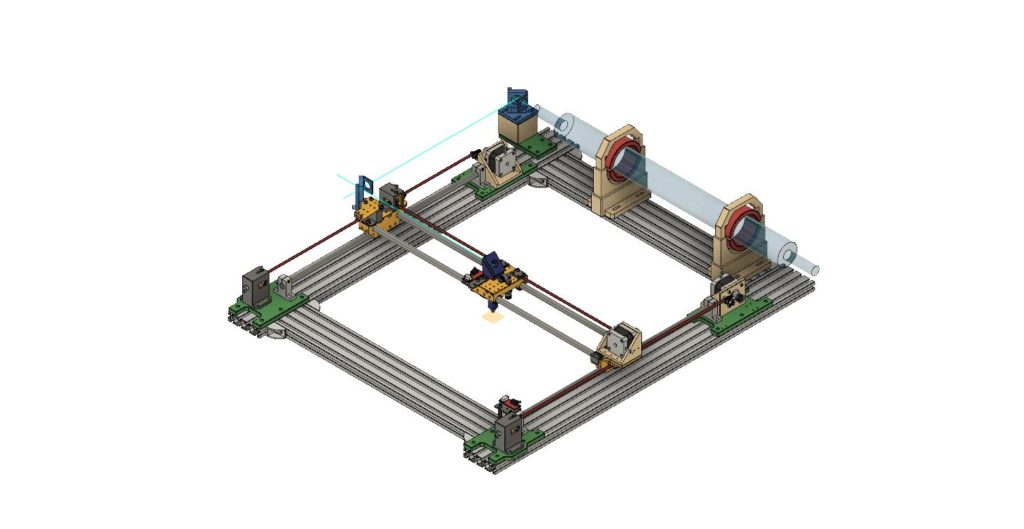
Y軸を現行の2モーター式から、左右のスプロケットをカップリングした1モーター式へ変更します。
XとY軸の直行度の調整は、こちらの構造のほうが補正しやすいと言う結論に至りました。
また、 改造のハードルの低さ=速攻性も決め手。
前回、せっかく組み立てたY軸キャリッジにヒビが入ってしまいました。
割れてしまったキャリッジを交換する前に、新たに作ったロボットケーブルのハーネスの動作確認をしておきます。
Y軸の組み立てに入ります。
ベースはアルミフレームを使います。
きっとケースやワークテーブルの自由度も上がるハズです。
相変わらず後付け設計ですが、どうなることやら・・・
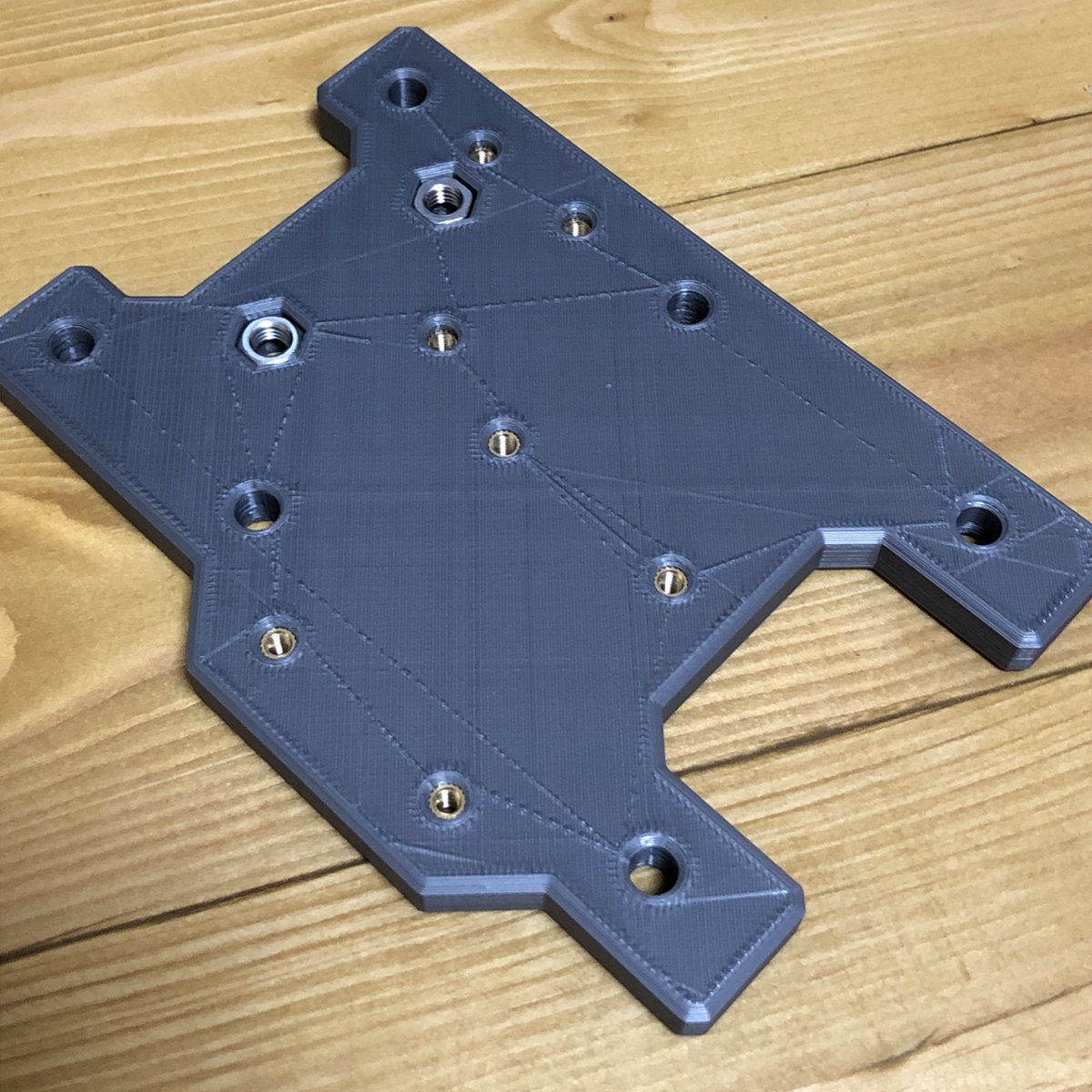
アルミフレームにのせるスペーサーを3Dプリント。
このスペーサーで高さ関係のつじつまを合わせます。
形状は長方形でもいいんですが、カッコつけです。
材料節約にもなるかな。
こんなのをあと3種類出力します。